双臂太空“握手” 哈工大联合研制的小机械臂完成首次双臂支持航天员舱外行走
18.11.2022 09:31
本文来源: 哈尔滨工业大学
来源: news.hit.edu.cn
哈工大全媒体(中国载人航天 新华网 机电学院 文/图)北京时间2022年11月17日16时50分,经过约5.5小时的出舱活动,神舟十四号航天员陈冬、刘洋、蔡旭哲密切协同,圆满完成出舱活动全部既定任务,航天员陈冬和蔡旭哲已安全返回空间站问天实验舱,出舱活动取得圆满成功。由我校机电学院刘宏院士、谢宗武教授团队和中科院长光所联合研制的小机械臂完成首次双臂组合支持航天员出舱任务。
组合臂状态下,航天员在小机械臂末端上
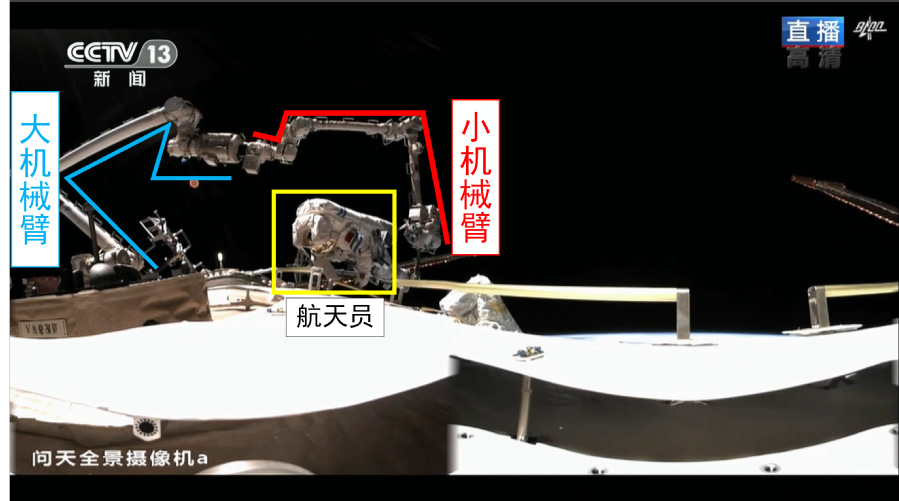
神舟十四号航天员乘组今天进行第三次出舱活动,此次出舱是空间站“T”字形三舱构型建成后的首次出舱。此次任务中,小机械臂通过机械臂转接件与大机械臂组合起来,实现双臂间电气和信息的互联互通。“双臂合一”后,整个机械臂系统活动范围更大、操作自由度更多,实现了航天员更大范围的快速转移,进一步提高航天员的舱外工作效率。
此次出舱首次检验了航天员与组合机械臂协同工作的能力,进一步验证了问天实验舱气闸舱和出舱活动相关支持设备的功能性能。同时,双臂在轨“握手”为后续双臂组合完成高难度、多样化任务提供有力支撑,满足了跨舱段、全空间站大范围不同位置精细作业的需求,有力保障我国空间站在轨建造任务顺利完成。
双臂组合过程
未来,借由组合臂功能,小机械臂可由问天舱转移至梦天舱上,实现小机械臂的跨舱段转移,为后续梦天舱上小机械臂单臂操作任务奠定基础。
双机械臂系统可直接从天舟货运飞船的开放式货舱直接抓取货物,搬运至实验舱的舱外暴露载荷挂点进行安装,进而实现“跨舱搬货”。
天宫空间站完成在轨组装任务后,天和核心舱太阳翼为解决光照遮挡问题,将在轨转移至实验舱桁架处安装,届时也可能会用上双臂级联组合功能。
本文来源: 哈尔滨工业大学
18.11.2022 09:31